大水深での作業を可能にする水中作業ロボット
DEEP CRAWLER
概要
DEEP CRAWLERは、大水深における無人化施工を可能とする水中作業ロボットです。
DEEP CRAWLERは、本体の動力を電動のみとし、遠隔操作を行います。本体形状は足回りに4基のクローラを装備しており、この4基のクローラは各々フリッパ角度を変えることが可能です。また、4軸式のマニピュレータを1基標準装備しています。
主な仕様
- 1)電動モータによる駆動(足回り・アクチュエータ)
- 2)足回りに4基のクローラを装備した本体形状
- 3)不陸での走破性能を上げるため、クローラのフリッパ角度調整が可能
- 4)標準装備のアクチュエータは4軸の自由度を持つ
- 5)水深3000m耐圧の設計
- 6)寸法:L2250×W1650×H2200mm
- 7)重量:約1.0t(気中)
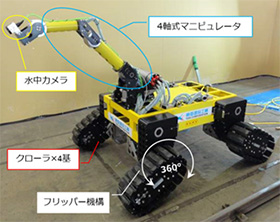
「DEEP CRAWLER」 本体
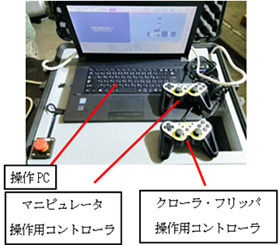
「DEEP CRAWLER」 操作装置
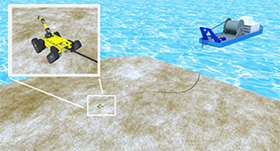
海洋における作業イメージ
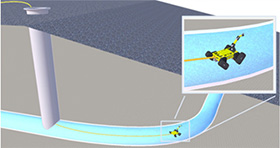
狭隘な水路内における作業イメージ
特長
- 1)3,000m水深の圧力に耐える設計で、海底鉱物資源のある深海でも作業が可能です。
- 2)フリッパ角度が調整できるクローラにより、不陸の多い場所でも走破性能の確保が可能です。
- 3)小型軽量な装置であり、簡素な付帯設備で運用が可能です。
- 4)本体上部には計測装置など、追加の装置を搭載できるスペースを有しています。
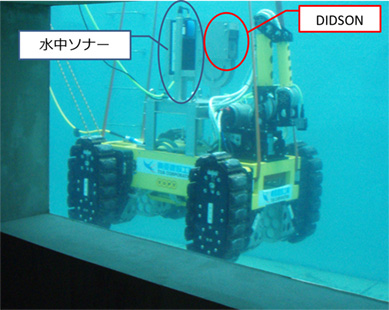
「DEEP CRAWLER」システム試運転状況 (DIDSON、水中ソナー搭載)
実績
- 海底ケーブル調査(潮流発電事業)
- 水路トンネル内調査(民間工事)
その他
■関連特許
- 特許第6689630号、特許第6912285号
お問い合わせ
詳しくは「お問い合わせフォーム」でお問い合わせ下さい。
関連技術
- イエローマジック
- 音響カメラ「DIDSON」