曳航式海底測量システム「ベルーガ・ディープ」を開発
〜水深200m以深の海底地形を高精度に測量〜
2009年10月16日
- ◆各種センサーをコンパクトに収納した曳航体が潜航
- ◆光ファイバーで測量データを高速送信
- ◆測量結果をリアルタイムに画面表示
東亜建設工業(社長:鈴木 行雄)は、国立大学法人 東京海洋大学海洋工学部(東京都江東区)、有限会社 エムアンドエム(北海道札幌市)と共同で、水深200m以深の海底地形の測量精度を高めるため、測量機器を搭載した曳航体が水中を潜航しながら測量する、曳航式海底測量システム「ベルーガ・ディープ」を開発しました。 このシステムにより、従来は測量精度が低かった水深200mから最大で350mの詳細な海底地形の測量データを取得することができます。
ベルーガ・ディープ開発の背景
海底の地形を測量する場合、従来は測量船の舷側(船体の側面)に搭載したナローマルチビーム測深機から、複数の音波(音響ビーム)を扇状に照射し、音波が海底にぶつかってはね返ってくるまでの時間をもとに、海底地形を面的に測量する手法が一般的でした。
しかし、水深が増すにつれて音波の往復距離が大きくなり、反射してくる音波が弱まるために、測量精度が落ちるという問題がありました。
この問題を解決するため、ナローマルチビーム測深機を搭載した曳航体を水中深く潜航させて、音波の往復距離を小さくすることで、より深い海底地形を高い精度で測量するシステムを開発しました。
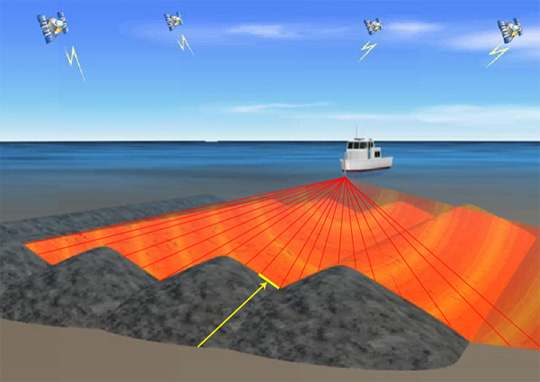
従来の測量:水深が増すと音波の照射範囲が広がり、海底面との距離も遠くなる。
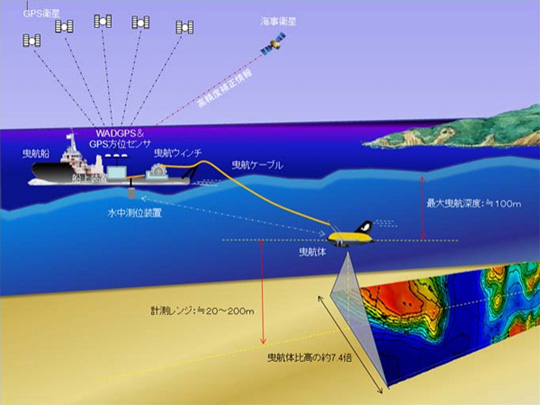
ベルーガ・ディープ: 測深機を搭載した曳航体自体が潜航することで、海底面との距離が近くなり、精度の高い測量を実現する。
ベルーガ・ディープの概要
ベルーガ・ディープは水中設備(曳航体)と船上設備(曳航船舶)に分かれており、
曳航ケーブルで結ばれています。
□水中設備(曳航体)は、ナローマルチビーム測深ソナー、動揺センサー、水圧センサー、
トランスポンダ(水中測位発信機)から構成されています。
| ・測深ソナー | 海底に扇状に照射された音波の伝播時間(送波器から出力された超音波が 受波器に到着するまでの時間)を計測する。 |
|---|---|
| ・動揺センサー | 曳航体の揺れに伴う測深ソナーの傾きを計測補正する。 |
| ・水圧センサー | 曳航体の水深変化を把握するため正確な水圧を計測する。 |
| ・トランスポンダ | 曳航船舶との距離と方位算出のため音波を発信する。 |
□船上設備(曳航船舶)は、GPS、ソフトウェア、水中測位装置、曳航ウインチから
構成されています。
| ・GPS測位装置 | 曳航船舶の現在位置を計測する。 |
|---|---|
| ・GPS方位センサー | 曳航船舶の現在方位を計測する。 |
| ・水中測位装置 | トランスポンダからの音波を受信し、 曳航体の水中位置(方位、深度)を計測する。 |
| ・ソフトウェア | 曳航体の水中位置、曳航船舶の位置を踏まえて、 曳航体の取得データを解析する専用ソフト。 |
| ・曳航ウインチ | 曳航ケーブルの出し入れを行い曳航体の制御を行う。 |
曳航体が取得した測量データは、光ファイバーケーブルを内蔵した曳航ケーブルを通して、曳航船舶上の専用ソフトウェアに送信され、曳航体の現在位置データと統合して、リアルタイムに解析されます。
ベルーガ・ディープの特長
1.測量水深域を拡大
ナローマルチビーム測深機を搭載した曳航体が、水深5m〜100mの範囲で潜航することにより、海底面との距離が近くなり、200m以深の海底地形においても、高い精度で測量ができます。
2.コンパクトな曳航体
曳航体は、各種の計測機器が耐圧ケースにコンパクトに収納されており、測量海域への搬入が容易です。
3.測量結果をリアルタイムに表示
曳航船舶では、曳航体の水中位置を把握すると同時に、曳航体から測量データを光ファイバーケーブルで高速で受信するため、測量結果をリアルタイムに解析することができます。また、大容量のデータ通信も可能です。
今後の展開
このシステムは、既に国土交通省東北地方整備局発注の「GPS波浪計測設備本体及び設置工事」において、海底地形の測量で採用され、精密な測量を行うことができました。
今後、中深度海域での精密測量に加え、大深度海域での漁礁、人工海底山脈の築造における施工支援や、海底ケーブル、パイプライン敷設工事での設計支援など、様々な海洋工事に貢献できるよう機能の向上を図っていきます。
「ベルーガ・ディープ」の曳航体

| 寸 法 | (全長L×最大幅W×最大高H) 1.45m×0.74m×0.84m |
|---|---|
| 重 量 | 約140kg |
| 最大深度 | 200m以上 |
「ベルーガ・ディープ」のシステム画面イメージ