大水深対応型水中作業ロボット
「DEEP CRAWLER®」を開発
2016年02月25日
東亜建設工業株式会社(東京都新宿区:社長 松尾正臣)は、トピー工業株式会社(東京都品川区:社長 藤井康雄)と共同で、大水深における無人化施工を可能とする水中作業ロボット「DEEP CRAWLER®」を開発しました。
開発の背景
潜水作業の安全と施工能力の向上を目的とした水中バックホウが平成7年に開発されて20年となります。この間、遠隔操縦に対応した機種も開発しており、耐圧性能として水深50mまで対応できていましたが、これを超える大水深での作業を無人で行うことができる機械の開発が求められています。また、資源開発の分野では、海底鉱物資源開発やエネルギー開発において、水深2,000mを超える深海での機械作業が試みられています。このような状況のもと、これまで培った水中施工のノウハウを活かして、海底鉱物資源開発も視野に入れた水深3,000mに対応可能な水中作業ロボットを開発しました。
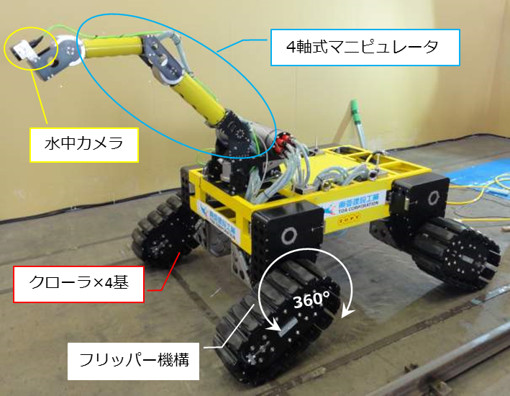
写真1 大水深対応型水中作業ロボット「DEEP CRAWLER®」
「DEEP CRAWLER®」の概要
「DEEP CRAWLER®」は、本体の動力を電動とし、遠隔にて操縦を行います。足回りには、クローラを4基装備しており、1基ずつ単独で可動させることができます。また、各クローラには小型の調査ロボットなどで実績のあるフリッパー機構を採用しており、クローラを360度回転できるため、凹凸のある場所での歩行性能を向上させています。
機体上部には4軸式のマニピュレータを搭載しており、マニピュレータ先端に作業ハンドやコアリング装置等を取り付けることで、各種作業が可能となります。現在は、光学式の水中カメラを搭載しており、調査用ロボットとして活用しています。
【主な仕様】
- ① 寸法(L×B×H):2.25×1.65×2.20m
- ② 耐圧性能:水深3,000m(水圧30MPa)
- ③ 質量:約1.0t(気中)
- ④ 電源:AC200V 約40A
「DEEP CRAWLER®」の特長
- (1) 水深3,000mの圧力に耐える各部パーツを装備しており、海底鉱物資源の開発事業においても調査や軽作業で活用することができます。
- (2) フリッパー角度調整可能な独立した4つのクローラを装備しており、凹凸のある場所での走行性能を向上させています。
- (3) 小型軽量な装置のため、運搬や搬入に大型の設備が不要です。
- (4) 小型で遠隔操縦が可能であるため、水路内の作業など様々なシーンに活用できます(図1)。
- (5) 簡単なフレーム構造のため、多様なアタッチメントが装着可能です(図2)。
- (6) 海底をクローラで走行するため、潮流や波浪の影響が少なく、浅瀬から大水深まで幅広い海域に活用できます(図3)。
- (7) 波浪や潮流の影響を受けやすい橋脚下部、岸壁の調査・補修にも活用できます(図4)。
- (8)スラスター(推進装置)を搭載することにより、壁面上を平面的に移動しながら作業を行うことが可能です(図5)。
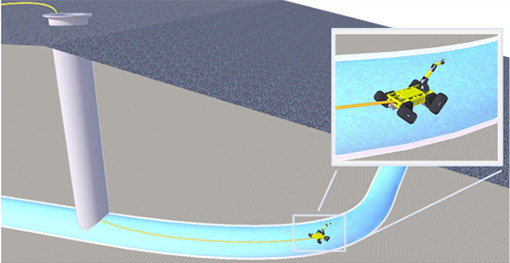
図1 狭隘な水路内における作業イメージ

図2 各種アタッチメント 装着イメージ
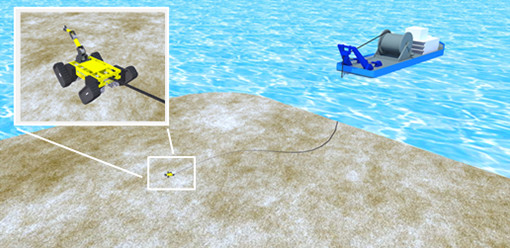
図3 海洋における作業イメージ
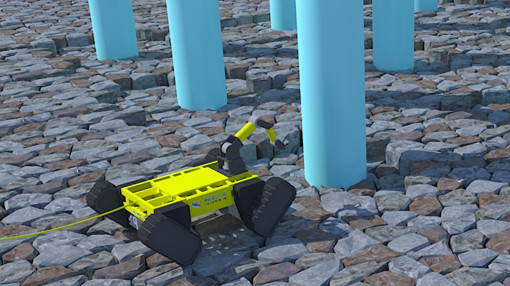
図4 橋脚下部での調査イメージ
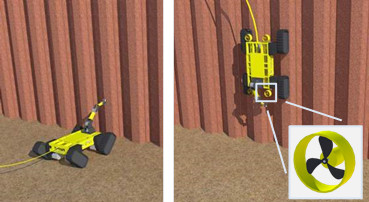
図5 壁面での作業イメージ
作業実績
2015年10月、九州地方の離島間に敷設された海底ケーブル調査にて「DEEP CRAWLER®」が活用されました。調査の目的は、海底ケーブルの敷設状況や摩耗・損傷状況の確認と、敷設ルートの位置確認であり、マニピュレータ先端に取り付けた光学式水中カメラにて海底ケーブルを視認する形で作業を行いました。現状この種の作業は、水中カメラを搭載した泳動型ROV(遠隔操作無人探査機)を用いて行うことが一般的ですが、水深が浅い海域や潮流の速い海域、波浪の強い海域では泳動型ROVを用いた調査が非常に困難となります。今回の調査は、対象水深が10~20m程度で、潮流が速い海域であったため、水深や潮流の影響を受けにくい「DEEP CRAWLER®」が採用され、目的を達しました。
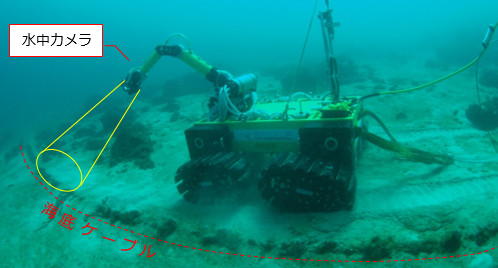
写真2 海底でのケーブル調査状況
今後の展開
現場への導入を通して実績を積み重ねると共に、施工効率の向上に向けた装置性能の向上とアタッチメント等の充実を図ります。
本件に関するお問い合わせ先
- 東亜建設工業株式会社 広報室 清水
- TEL:03‐6757‐3821 / FAX:03‐6757‐3830