動揺する船舶から洋上施設・岸壁への安全な乗降を実現するため
「動揺吸収型可動式桟橋」の開発に着手
2014年02月19日
東亜建設工業株式会社(東京都新宿区:社長 松尾正臣)は、法政大学大学院先端モーションシミュレータ技術研究所の田中豊教授らの研究グループ、株式会社工苑(神奈川県川崎市:社長 野見山望)、ジャパン マリンユナイテッド株式会社(東京都港区:社長 三島愼次郎)と共同で、高波浪時に動揺する船舶から洋上施設や岸壁等へ安全に作業員を乗降させる設備として、「動揺吸収型(6軸モーションベース型)可動式桟橋」の開発に着手しました。
開発の背景
海上工事現場において、陸域と作業船や洋上施設との移動には、一般的に交通船が用いられます。しかし、高波浪時は交通船が大きく動揺するため、作業員の海中転落・挟まれ事故のリスクや、洋上施設等への移動の制約よる作業効率の低下が大きな課題となっていました。
そこで当社は、作業安全と作業効率の確保を目的に、「動揺吸収型(6軸モーションベース型)可動式桟橋」の開発に着手しました。動揺吸収型可動式桟橋とは、作業員が乗降するプラットフォームの架台となる上下ベースプレートを6本のシリンダーで繋ぎ、そのシリンダーの伸縮を自動制御することによって6自由度(注1)の運動を可能とする装置です。当該装置を作業船上に固定し、船舶の動揺を打ち消すように各シリンダーを適切に制御することで、高波浪時で船舶が動揺した場合でも、プラットフォームを常に水平に保つことが可能となります。当該装置の開発により、作業船から直接、洋上施設や岸壁へ安全に乗降することが可能となります。
現在、平成27年3月のプロトタイプ(注2)完成を目指し、産学共同での開発を進めています。
本装置の概要
「動揺吸収型(6軸モーションベース型)可動式桟橋」は、上下2枚のプレートが6本のシリンダーで接続された「モーションベース部」、作業員が乗降する場所となる「プラットフォーム」、上下左右へ可動するヒンジ機構を有する「桟橋部」から構成されます。
作業船に固定された「モーションベース部」は、センサーによって測定される船舶の動揺を打ち消すように、各々のシリンダーを適切に制御することにより、プラットフォームを常に水平に保ちます。加えて、他の船舶の航行により発生する航跡波により、突然、船舶が大きく動揺するケースでも、「桟橋部」の連結構造が上下左右方向に動くヒンジ機構になっているので、シリンダーで制御できない動揺を吸収することが可能です。
また、桟橋部先端の電磁式マグネットにより、洋上施設への固定及び安全な乗降を可能にします。
注1:6自由度
前後、左右、上下、ロール、ピッチ、ヨーの6種類の動きを6自由度と言います。ある物体が空間の中に存在する時、その重心の位置は、前後、左右、上下で表わされるいわゆるX、Y、Zの座標系で決定されます。さらに、重心を中心として、左右方向への傾きをロール、前後方向への傾きをピッチ、そして左右方向へのひねりをヨーと呼びます。
注2:プロトタイプ
製作の参考にするための実物モデル(試作品)のこと。
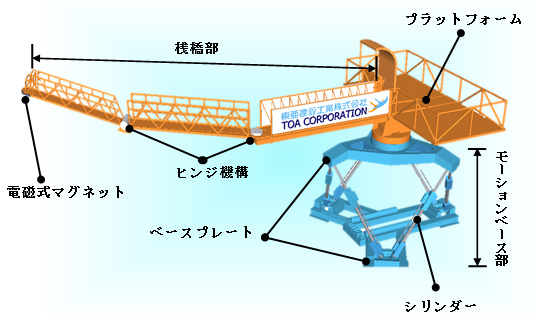
「動揺吸収型(6軸モーションベース型)可動式桟橋」構造図

「動揺吸収型(6軸モーションベース型)可動式桟橋」運用イメージ図
本件に関するお問い合わせ先
- 東亜建設工業株式会社 広報室 清水
- TEL:03‐6757‐3821 / FAX:03‐6757‐3830