深い海底における瓦礫撤去作業を効率化
「ピンポイント水中グラブ位置誘導システム」を開発
2013年06月17日
東亜建設工業株式会社(東京都新宿区:社長 松尾正臣)は、東日本大震災により大きな被害を受けた東北地方などの災害復旧工事において、海底深くに沈んだ瓦礫を効率的に撤去するため、「ピンポイント水中グラブ位置誘導システム(以下、本システム)」を開発しました。
開発の背景
災害復旧工事における瓦礫撤去作業では、通常、グラブ式浚渫船が使用されます。
従来、グラブ式浚渫船は、ブームの先端にGPSアンテナを設置して、グラブバケットの位置誘導を行っていましたが、ブーム先端を目標地点に誘導しても、潮流の速い場所ではグラブバケットが流されてしまうため、瓦礫をグラブバケットで効率的に掴むことが困難でした。
そこで、当社は、①ブーム先端に設置したGPS、②操船室に設置した船体の位置と方向を求めるGPS方位計、③グラブバケットに設置した船体に対するグラブバケットの位置を求める三次元水中位置計測装置、を組み合わせることにより、水中のグラブバケット位置をリアルタイムに求め、高精度に目標地点へ誘導することを可能にする本システムを開発しました。
「ピンポイント水中グラブバケット位置誘導システム」
Pinpoint Underwater Grab-bucket Navigation System : PUG(パグ)ナビ(通称)
本システムの概要
操船室に取り付けたGPS方位計で浚渫船の位置・方位を求めると同時に、ブーム先端に取り付けたGPSでブーム先端位置を求めます。また、水中部は、三次元水中位置計測装置を用いてグラブ浚渫船に対するグラブバケットの位置を求めます。
これらのデータを組み合わせることで、ブーム先端の位置と水中でのグラブバケットの位置を表示します。
オペレータは、リアルタイムに表示される画面を見ながらグラブバケット位置を目標地点へ正確に誘導することができるため、作業効率の向上により、高い精度での施工が可能となります。
また、無線LANを用いてオペレータ室、操船室などで施工情報を共有できるようになっており、作業効率、安全性の向上が図れます。
尚、本システムは、新技術情報提供システムNETISに登録されています。
(登録番号=KTK-120005-A)
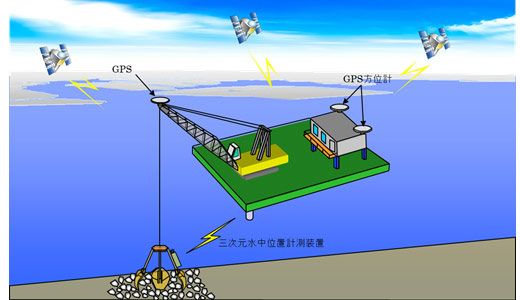
システムイメージ図
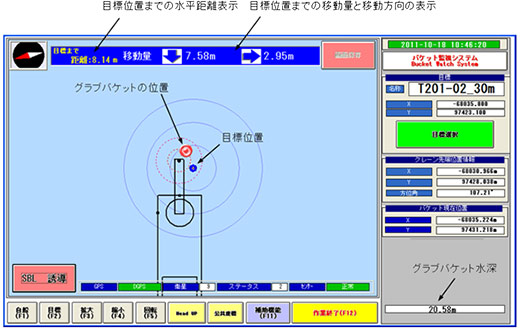
画面表示例
本システムの特長
-
(1) オペレータは、リアルタイムに表示される画面を見ながらグラブバケット位置を目標地点へ誘導することができるため、作業効率が高まり、施工精度も向上します。
-
(2) モニター画面には、グラブバケットの位置だけではなく、船体やブーム先端の位置も表示されるため、オペレータと浚渫船の操船者が位置情報を共有し、安全かつスムーズに作業が行えます。

瓦礫撤去状況

グラブバケットに取り付けた三次元水中位置計測装置

オペレータの操作状況

ブーム先端に取り付けたGPS
今後の展開
本システムは、東日本大震災で大きな被害を受けた東北地方をはじめとする災害復旧工事において、津波で流され水深20〜60mの海底に沈んだ瓦礫(ロープ、漁網、シンカー、養殖設備など)の撤去を行う際に使用しました。
また、災害復旧工事のみならず、既設構造物と近接した場所での浚渫工事、捨石投入工事など、施工精度が要求される工事にも導入した実績があります。
水中でのグラブバケットやフックの位置が把握できるため、今後は漁礁の据え付け作業等にも適用していきたいと考えています。
本件に関するお問い合わせ先
- 東亜建設工業株式会社 経営企画部広報室 清水
- TEL:03-6757-3821 / FAX:03-6757-3830